We are welcoming the scientific advisory concil of OFFIS today. Looking forward to interesting chats at our demonstrator with Prof. Wahlster, Prof. Stich, Prof. Kagermann, Mr. Dohler, Prof. Kikinis, Prof. Lemmer and Prof. Krüger.
I attend the ITEA PO Days brokerage event in Amsterdam (Sept. 3rd and 4th). I’m open to chat about collaboration opportunities.
Our exhibit of our vision on Industry 4.0 for the Lower-Saxony competence center in ICT for Industry 4.0 at Hannover Messe 2019 was a wide success. Also, Minster Thümler opened our new R&D division on Manufacturing.
I attend the 2019 European Robotics Forum in Bucharest, Romania. I look forward to a few days of networking and proposal writing!
I will attend the ITEA3 PO Days brokerage event next week (Sept. 4th and 5th). If you are around, drop me a line!
The site is now served by the excellent Amazon Web Services, via S3 with distribution via CloudFront with TLS encryption!
Our exhibit of virtual reality based programming of a work order for a collaborative robot for the Lower-Saxony competence center in ICT for Industry 4.0 at Hannover Messe 2018 was a huge success. Press clipping (German only)
I attended the euRobotics workshops on digital innovation hub networks in Brussels, bringing in our background in healthcare through the federal cluster on nursing care and agile production through the Lower-Saxony competence center in ICT for Industry 4.0.
FERCHAU published an article featuring our project IKIMUNI on their blog, focusing my robotics activities: “Hand in hand with the robot colleague”. German only.
We are exhibiting the project IKIMUNI at Hannover Messe in the booth of the state of Lower Saxony.
The site is now served by the Netlify CDN, with automatic build on GIT push and TLS encryption thanks to Let’s Encrypt!
Our article on The Pinax-Model for Accurate and Efficient Refraction Correction of Underwater Cameras in Flat-Pane Housings has been published open access in the Elsevier journal Ocean Engineering.
I have a new position as a senior researcher at the OFFIS Institute for Information Technology in Oldenburg, Germany.
The simulation environment based on Gazebo developed for the DexROV project is presented as a video update in the DexROV YouTube channel.
Our overview article on Simultaneous Localization and Mapping has been published in the Wiley Encyclopedia of Electrical and Electronics Engineering.
We are preparing for the first review meeting of the DexROV project tomorrow in Brussels, Belgium. Our contributions focus on online localization, stereo sensing, and object recognition.
Evaluating Programming Competences:
Quantifying programming skills and competences is quite a challenge, especially for self-evaluation and learning progress visualization. In the context of a recent class on Software Engineering, I looked for a somewhat concise yet expressive list of programming skills and their levels. My idea was to use such a list to survey student backgrounds coming into the class, and allow the students to track their own development either in the course or during their studies.
more...Website Overhaul with Hugo:
I had been working on an overhaul of this website for a while, and finally it is live! Thanks to Hugo to make it relatively easy to fulfill my ideal website building experience.
more...Software and hardware integration for DexROV is well under way, and last weeks integration meeting in Marseille at COMEX on board their JANUS II vessel was quite fruitful. Our focus was on software integration between partners at the interface level using the simulation we developed so far.
Code: Robust edge types for G2O:
While robust SLAM has certainly been seeing a lot of attention, getting code releases to run with current versions of dependencies, specifically G2O, can be somewhat difficult. I shared my patches to existing code and some original edge implementations on GitHub to make replicating experiments easier. more...Code: Simulating network links with Docker:
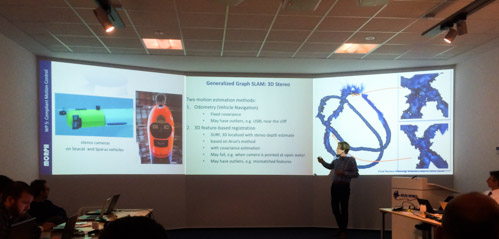
Quite often I need to test a multi-robot setup with degraded network links. This can be done well with products such as WANem. The big drawback is that a physical computer with multiple network interfaces is required. With the advent of Docker, we actually have a great tool for developing for distributed systems, and this small set of scripts implements a network simulation for Docker networks. more...Our IJRR article on Generalized Graph SLAM: Solving Local and Global Ambiguities through Multimodal and Hyperedge Constraints is finally in a physical issue! The reference and bibtex are updated accordingly.
We just finished a plenary meeting in Genova for the DexROV project in which we discussed our progress in the first year.

The final review of the MORPH project went very well, with praising comments from the reviewers! My work on robust SLAM was one of the key contributions by Jacobs.
The second year review of the CADDY project in Lisbon just finished, with important contributions by Jacobs focusing on underwater gesture recognition using stereo data.
IEEE/MTS Oceans’15 in Genova kicks off. A total of three papers with my contributions will be presented.
Our IJRR article on Generalized Graph SLAM: Solving Local and Global Ambiguities through Multimodal and Hyperedge Constraints has been accepted to the International Journal on Robotics Research and should be available online soon.
Field trials for the EU FP7 MORPH project at St. Feliu de Guixols (Costa Brava, Spain) started. Our contributions focus on view planning and 3D SLAM with stereo cameras.
New EU Horizon2020 project DexROV starts today! I will be responsible for underwater perception and modeling as work package leader.
Our ICRA2014 paper Representing and Solving Local and Global Ambiguities as Multimodal and Hyperedge Constraints in a Generalized Graph SLAM Framework is a finalist for the conference best paper award!